


Máy hàn Robot Laser CNC với tự động hóa quy trình robot 6 trục
Hệ thống hàn laser robot sáu trục
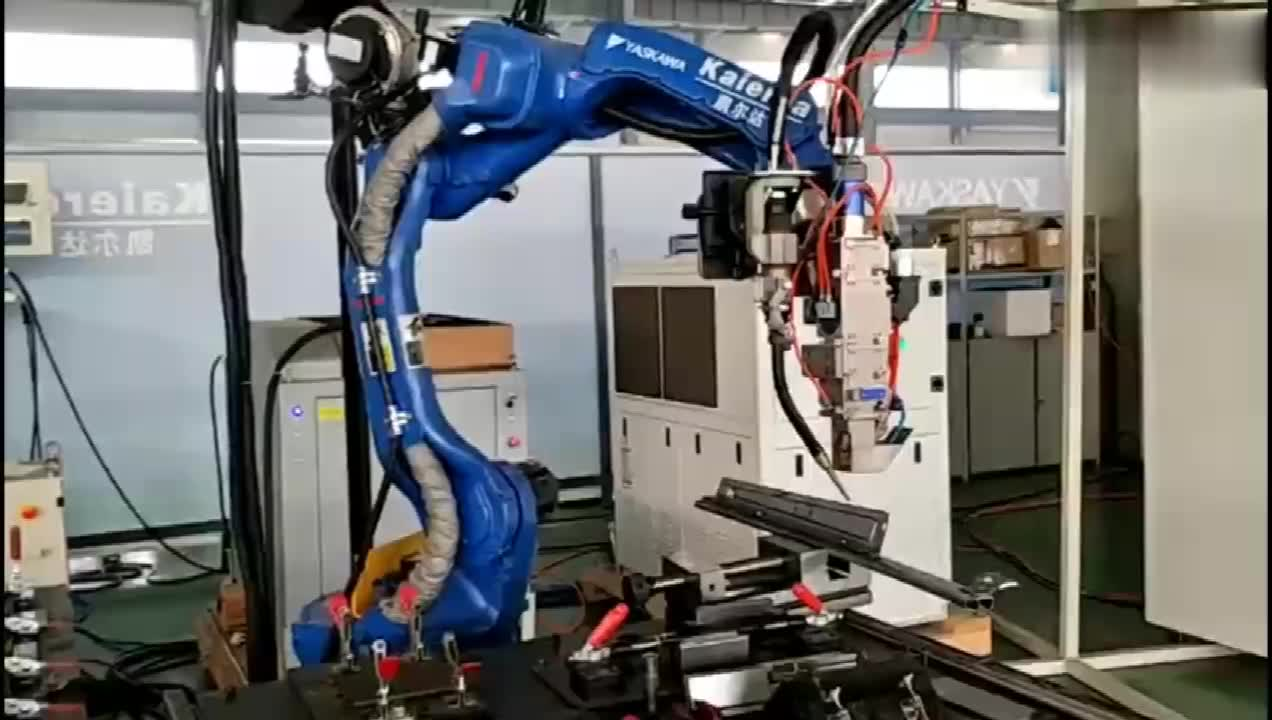
Máy hàn robot
1. Độ chính xác cao, tốc độ nhanh và khả năng sử dụng tốt để nâng cao hiệu quả sản xuất đáng kể;
2. Dễ dàng vận hành sau khi đào tạo đơn giản;
3. Chức năng an toàn được nâng cấp hơn nữa để giám sát vị trí hàn theo thời gian thực;
4. Cấu trúc sáu trục linh hoạt trong hàn, giúp cải thiện đáng kể chất lượng hàn;
5. Thiết kế định tuyến robot tiêu chuẩn và hợp lý, giúp cải thiện hiệu quả tuổi thọ cáp trong quá trình chuyển động;
6. Có thể tùy chỉnh để đáp ứng các nhu cầu khác nhau của bạn

Ứng dụng
Hàn các vật liệu kim loại trong giao thông vận tải, điện tử, đồ kim khí gia dụng và các ngành công nghiệp khác.
Mô tả ngắn gọn về hệ thống hàn laser robot sáu trục
1.1 Giới thiệu robot sáu trục
1.1.1 Sơ đồ mô hình (tham khảo) – Máy hàn laser robot 6 trục
1.1.2 Robot sáu trục là cấu hình robot điển hình nhất
Nó chủ yếu bao gồm các khớp và thanh kết nối. Cánh tay robot và cổ tay phối hợp với nhau
để hoàn thành chuyển động quỹ đạo mục tiêu, với 6 bậc tự do trong không gian.
1.1.3 Sáu trục của robot cộng tác sáu trục là gì?
Nói chung, một robot sáu trục thông thường bao gồm xoay (trục S), cánh tay dưới (trục L), cánh tay trên (trục U), xoay cổ tay (trục R), xoay cổ tay (trục B) và xoay cổ tay (trục T). ), v.v. Cấu trúc 6 khớp và sự tổng hợp của 6 khớp thực hiện chuyển động 6 bậc tự do của đầu cuối, giúp robot cộng tác 6 trục có nhiều ưu điểm như tính linh hoạt cao, tải trọng siêu lớn và độ chính xác định vị cao.
1.1.4 Vai trò của từng trục của robot 6 trục là gì?
Trục đầu tiên:
Đó là vị trí của khung liên kết, vị trí chịu lực và lõi chịu lực
trọng lượng của toàn bộ robot và chuyển động lắc lư lớn của robot sang trái và phải.
Trục thứ hai: chủ yếu là trục quan trọng để điều khiển robot đu đưa qua lại và duỗi người.
Trục thứ ba:
Nó điều khiển robot lắc qua lắc lại, nhưng phạm vi xoay nhỏ hơn nhiều so với
của trục thứ hai, nhưng điều này cũng được xác định bởi sải tay của robot sáu trục.
Trục thứ tư: Là trục điều khiển khả năng xoay tự do 180° của cánh tay trên, tương đương với cẳng tay của con người.
Trục thứ năm: Nó rất quan trọng. Khi đã điều chỉnh gần đúng vị trí và định vị chính xác trên sản phẩm, bạn cần sử dụng trục thứ năm, tương đương với cổ tay con người.
Trục thứ sáu:
Sau khi trục thứ năm được định vị trên sản phẩm, cần có một số thay đổi nhỏ và trục thứ sáu là bắt buộc. Trục thứ sáu tương đương với một chiếc bàn xoay có thể xoay 360°
theo chiều ngang. Sản phẩm có thể được định vị chính xác hơn
1.1.5 Bộ phận chuyển động cơ học của trục
Mỗi trục được di chuyển bởi một bộ mô tơ servo và bộ giảm tốc chính xác, và bộ giảm tốc được chia thành
Bộ giảm tốc RV và bộ giảm tốc điều hòa
1.1.6 Điều khiển chuyển động trục và thành phần hệ thống
Chuyển động giữa các trục được điều khiển bởi hệ thống điều khiển của robot. Phần cứng của hệ thống điều khiển là bảng điều khiển công nghiệp, còn phần mềm là bảng điều khiển
thuật toán điều khiển.
Hệ thống hàn laser robot là một ứng dụng toàn diện trong ngành laser tích hợp
máy móc, điện, thuật toán phần mềm, công nghệ laser, v.v.
Bây giờ nó đã bước vào kênh phát triển nhanh chóng. Với sự phát triển nhanh chóng của
thuật toán phần mềm, tầm nhìn và máy móc ở nước ta sẽ là xu hướng trong tương lai!



